%FPS bot testing
close all;
offsetAngles = [0 0 0 0 0];%Just the difference in angle between frontmost motor and forward direction.
motorCounts = [3 4 5 6 7];
motorAngles = 2*pi./motorCounts;
for j = 1:numel(motorCounts)
mvec = zeros(motorCounts(j),2);
for k = 1:motorCounts(j)
mvec(k,:) = [cos(offsetAngles(j)+(k-1)*motorAngles(j)) -sin(offsetAngles(j)+(k-1)*motorAngles(j))];
end
resolution = 10000;
theta = linspace(0,2*pi,resolution)';
directionVector = zeros(resolution,2);
directionVector(:,1) = cos(theta);
directionVector(:,2) = sin(theta);
%Speed
mag = zeros(resolution,1);
currentMag = zeros(motorCounts(j),1);
for k=1:resolution
for i=1:motorCounts(j)
currentMag(i) = abs(mvec(i,:)*directionVector(k,:)');
end
mag(k) = max(currentMag);
end
figure;
plot(theta,mag);
ylabel('Normalized speed magnitude');
xlabel('Direction (radians)');
title(['Normalized speed magnitude vs. direction, ' num2str(motorCounts(j)) ' motors']);
%Torque
motorUse = zeros(resolution,1);
for k=1:resolution
for m=1:motorCounts(j)
motorUse(k) = motorUse(k)+abs(mvec(m,:)*directionVector(k,:)');
end
end
figure;
plot(theta,motorUse);
ylabel('Equivalent motor usage (# of motors)');
xlabel('Direction (radians)');
title(['Motor usage vs. direction, ' num2str(motorCounts(j)) ' motors']);
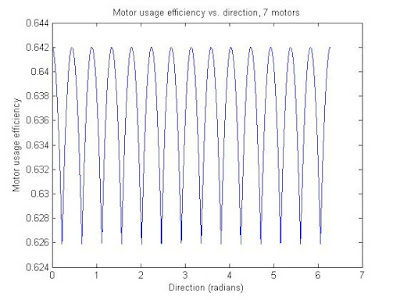
figure;
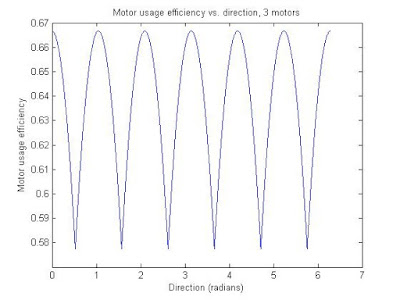
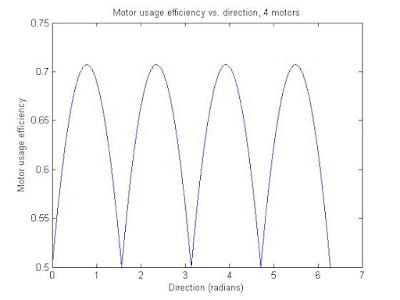
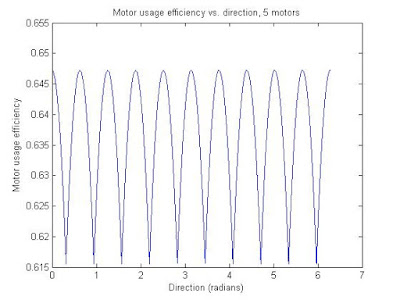
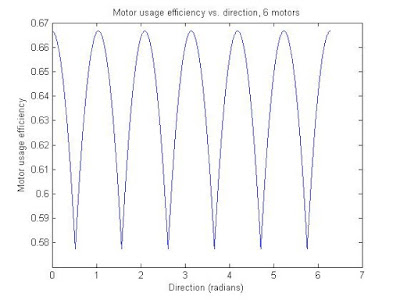
plot(theta,motorUse/motorCounts(j));
ylabel('Motor usage efficiency');
xlabel('Direction (radians)');
title(['Motor usage efficiency vs. direction, ' num2str(motorCounts(j)) ' motors']);
end